
 Follow us on Twitter
Follow us on Twitter
Robotics Blog
May 13, 2016
3Spheres Robotics Project Update
Just a quick update on the 3Spheres Robotics Project…
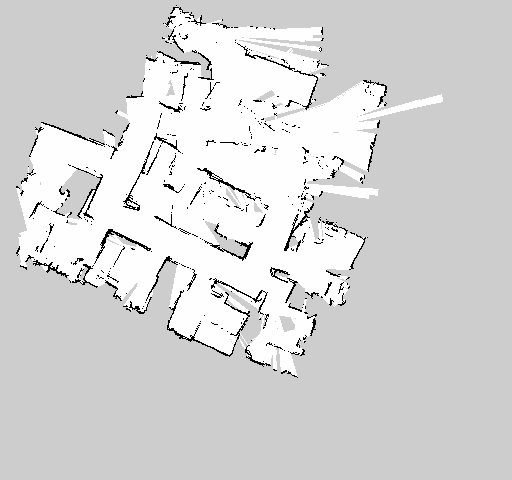
Last week we completed our first simultaneous localization and mapping (SLAM) trial at a Developmental Disabilities Association (DDA) group home, using our robot prototype. Here is what the robot saw in 2D (Black is an obstacle like a wall or furniture, white is open space, grey is the unobserved area):
The reaction by the DDA group home clients was delightful. They thought it was great fun! The initial experience supports our hypothesis that the introduction of robots into a group home environment could have significant “quality of life” effects for clients, beyond the benefits of client monitoring… perhaps the “social impact” use cases are even more important than we first thought. Maybe we have stumbled on to something more profound. Alanna Hendren (DDA) thinks “…robots have huge potential re: combating social isolation and for entertaining – they could even learn how to make each person laugh!” SFU Surrey is quite interested in this aspect of the research.
UBC and JDQ submitted our first Engage grant application to NSERC this week. This will help us improve on the SLAM mapping and start the “dynamic obstacle avoidance” navigation use cases. The joint UBC/SFU Mitacs Accelerate Cluster grant for the project is just about ready and will include 6 doctoral/post-doctoral paid internships working on navigation, computer vision, speech recognition and human interaction use cases.
JDQ and BCIT are gearing up to create a new Social Robotics Pop-up Lab (ROBOpop), this fall, mirrored on a successful initiative in Amsterdam. http://test.vazdias.nl/ Stay tuned.
May 9, 2016
Next Vancouver Robot Operating System (ROS) Users Group Meetup
Robot Mapping Using SLAM
Thursday, May 12, 2016
6:00 PM
BCTIA Innovation Hub
101 -887 Great Northern Way
Vancouver, BC
Simultaneous localization and mapping (SLAM) is the computational problem of creating a map of a space while simultaneously tracking the robot’s location within it. While this initially appears to be a chicken-and-egg problem there are algorithms for solving it, using probability statistics and known reference points.
Our presenters for this meeting will describe robot mapping problems, introduce some clever methodologies for solving SLAM problems and demonstrate the process in our meeting room environment using ROS packages.
Are you a current member, or would like to join the ROS Meetup, click here to RSVP and find out more information.
Mar 21, 2016
Inaugural ROS Users Group Meeting
On March 31st, 2016; Project manager for the 3Spheres Robotics project, Jon Morris will give an update on a new collaboration in BC to design and prototype a collaborative service robot to help people with disabilities reach their personal goals and achieve greater independence. As an open source initiative, ROS will play a key role in the development process, and Jon will share the shortcuts and challenges that ROS provides.
As project manager for the 3Spheres Robotics project, Jon Morris will give an update on a new collaboration in BC to design and prototype a collaborative service robot to help people with disabilities reach their personal goals and achieve greater independence. As an open source initiative, ROS will play a key role in the development process, and Jon will share the shortcuts and challenges that ROS provides.
After a quick networking break, Derek Shackleford, CTO at JDQ Systems Inc, will share a real ROS technical problem with the group, highlighting the challenges of getting the latest robotics hardware (computer, sensors, mobile base) to “talk” to one another. Using ROS, a Kobuki, a Kinect V2 sensor and laptop, Derek will either present a solution or ask the audience for help, depending on current status of the issue!
Using a real-time, wed-based, audience polling application, Jon will get feedback from the ROS users group on areas of interest and future meetup topics.
Click Here for more information.